

先端研の研究領域
研究事例
SLAM点群による屋内自動モデリング
什器類の影響を受けにくい三次元モデル作成手法
はじめに
屋内ナビゲーションサービスの高度化などに向けて、屋内空間の三次元モデルを効率良く作成する技術が注目されています。
従来は、図面や現地の計測結果から手動で三次元モデルを作成していたため、多くの時間と労力が必要となっていました。しかし、近年はレーザスキャナによって自己位置を推定しながら点群を取得するSLAM(Simultaneous Localization and Mapping)技術の発展により、容易に屋内空間の点群を取得できるようになりました。さらに、点群から自動で屋内空間の三次元モデルを作成する手法が開発されていることから、より短時間かつ、少ない労力で屋内空間の三次元モデルを作成できるようになりつつあります。
しかし、既存の自動モデル化手法は、机や棚などの什器類の多く存在する空間では適用が困難であるという課題があります。そこで、アジア航測では、什器類の多数存在する屋内空間を対象として、SLAMによって取得した点群から三次元モデルを自動で作成する技術を開発しました。開発手法を書棚やホワイトボードなどの存在する屋内空間を計測した点群に対して適用することで、適切にモデル化できることを確認しました。本稿では、SLAMによる点群の取得に加えて、モデル化の手法と適用結果を紹介します。
SLAMによる点群の取得
アジア航測新百合ヶ丘本社の会議室と通路を対象として、SLAMによって点群を取得しました。本稿で使用したデータの取得には、約2kgのEmesent社製のHovermapを使用しました。HovermapにはVelodyne Lidar社製のレーザスキャナであるVLP-16が搭載されています。
VLP-16のスペックは最大計測距離が100m、点群の測定精度が3cm、計測点数が30万点/秒です。
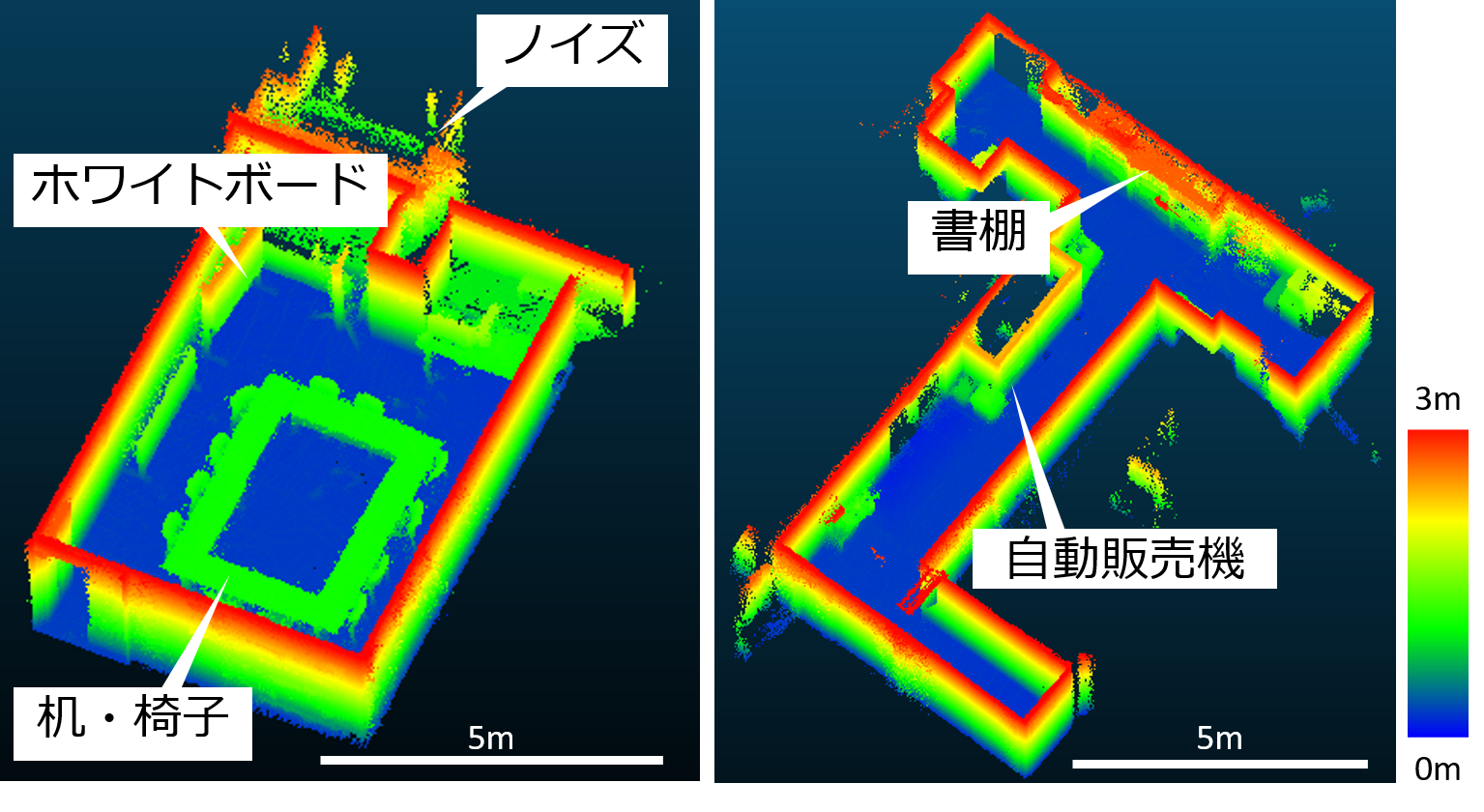
図1に示すようにHovermapを持ちながら約2分かけて約50m歩くことで点群を取得しました。計測に際しては、極力データの欠損が少なくなるように注意しながら歩行しました。取得した点数は、会議室が約390万点、通路が約490万点でした。図2に取得した点群を示します。床や壁面、天井の他に、机や椅子、ホワイトボード、書棚や自動販売機が点群として取得されていました。また、会議室の窓ガラス付近にはレーザの乱反射に起因する計測ノイズが存在しました。

SLAM点群からの自動モデル化手法
本手法では厚みを持たない平面からなり、壁面同士が直交した三次元モデルを作成することとしました。モデル化する対象物は、壁面、床、天井、ドアの4種類です。作成する三次元モデルでは、壁面の一部を切り取ることでドアを表現します。本手法はSLAM点群から、自動で三次元モデルを作成でき、什器類やノイズの影響を受けにくく、幅の狭い壁面も抽出でき、どのような点群密度のデータに対しても動作することを特徴としています。
本手法ではまず、計測点群の分布に基づいて床と天井の高さを推定し、壁面候補を抽出します。続いて、壁面候補の整列・直角化、壁面のみの抽出、壁面の接続によって三次元モデルを作成します。
モデル化手法の適用結果
SLAMによって取得した会議室と通路の点群それぞれに開発した手法を適用して三次元モデルを作成しました(図3)。会議室と通路の両方で、高い書棚やホワイトボード、机などの影響を受けずに存在するすべての壁面を抽出できました。会議室では、窓ガラス付近の計測ノイズの影響も受けていません。また、壁面と床や天井の接合部においても不整合もありません。対象空間内のドア部分の壁面には、開口部が適切に作成されていることが分かります。
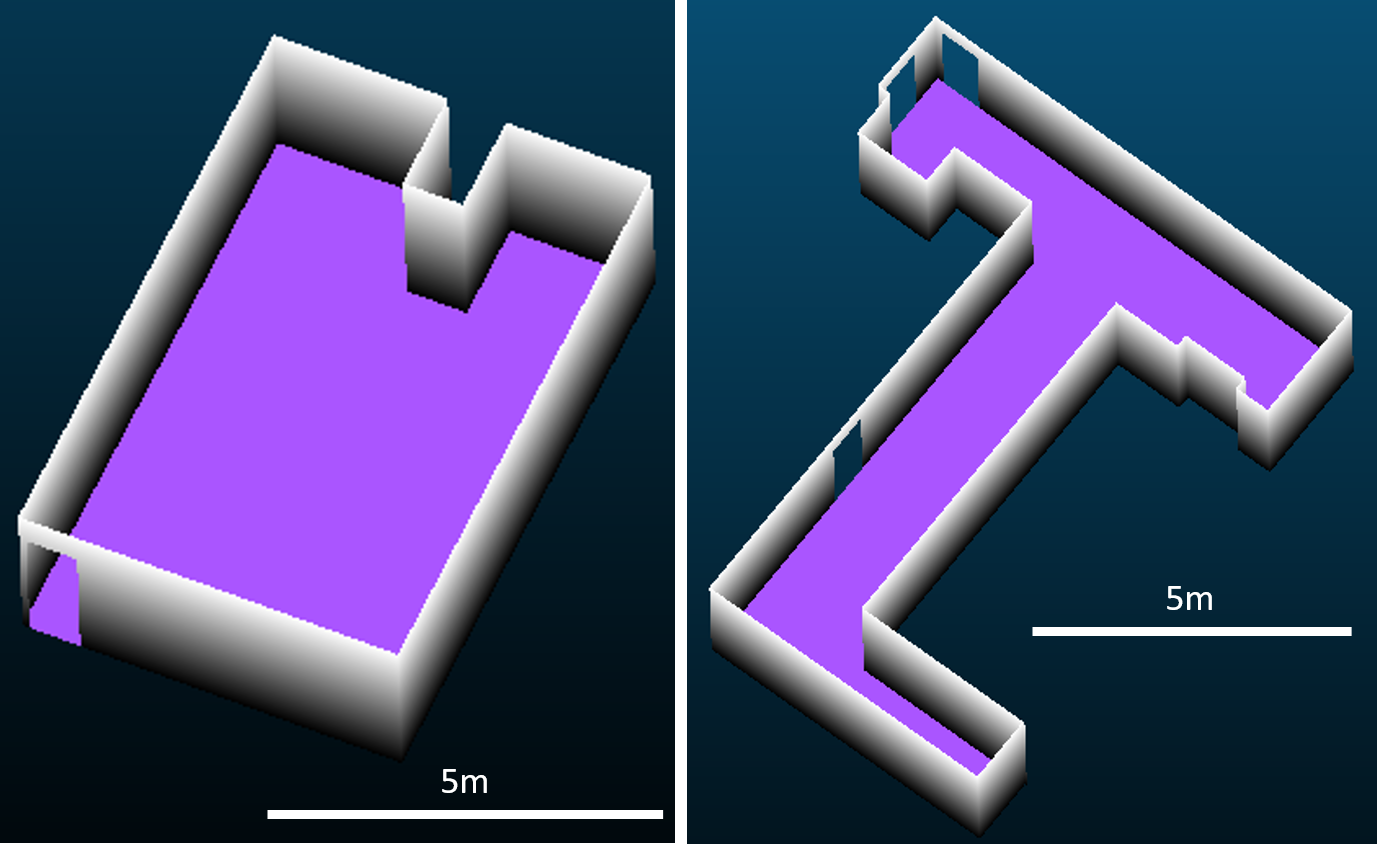
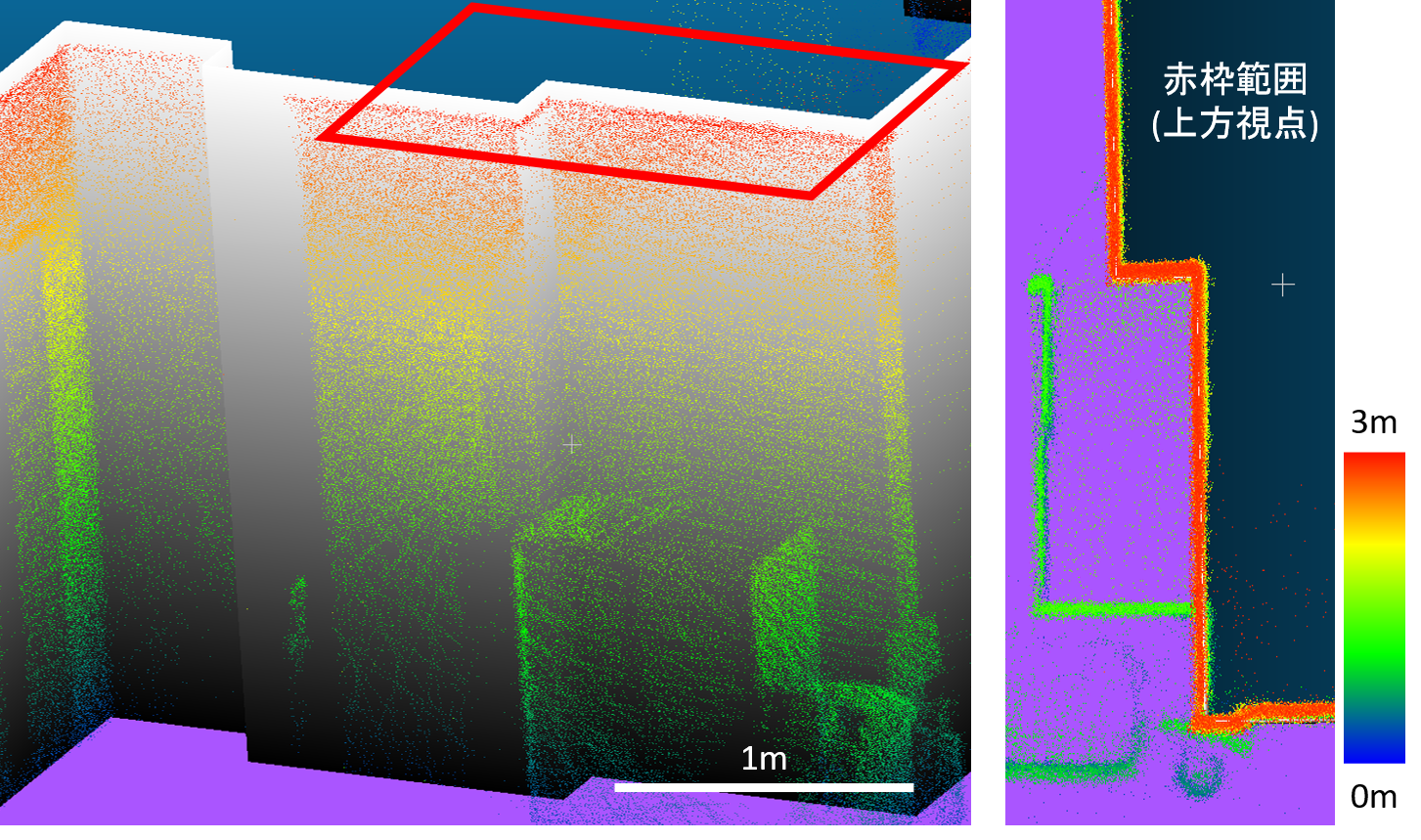
図4左に通路の一部における点群と三次元モデルの拡大図を示します。この箇所では幅が20cm程度の狭い壁面も抽出できていました。また、壁面を構成する点群は機器の測定精度に起因するばらつきをもっていますが、三次元モデルの壁面は、壁面構成点群の中心付近に生成されていることを確認しました(図4右)。
モデル化に要した時間は会議室が1分52秒、通路が3分57秒でした。処理に使用したPCのスペックは、CPUがIntel Xeon W-2123 3.60GHz、メモリが32GBです。会議室と比べて通路は壁の凹凸や高い什器類が多く、処理時間が長くなっています。
おわりに
本稿では、屋内空間を対象として、SLAMで取得した点群から三次元モデルを自動で作成する技術を紹介しました。会議室と通路を対象とした実証実験では、SLAMによって短時間で高密度の点群を取得できました。開発したモデル化技術を取得点群に適用した結果、机や棚といった什器類のある空間でも壁面や天井、床をモデル化できることが分かりました。
今後の課題としては、階段やスロープなどのある空間や複雑な壁面からなる空間のモデル化が挙げられます。また、屋内ナビゲーションサービスの高度化を実現するには、歩行可能空間の推定や屋内空間内の様々な物体の認識が必要となります。アジア航測では、屋内空間を対象としたモデル化技術の高度化に継続して取り組んでいきます。